

Die beschriebene Modifikationan eines Microsizers Empfängers hat drei Ziele.
Die Modifikation am Empfänger genügt nicht, es muss auch ein entsprechender Sender verwendet werden. Der entsprechende Sender ist hier beschrieben.
Wie es funktioniert
Der Empfänger besteht aus einer Stromversorgung, einem HF Teil, der die Funksignale empfängt, einer Verstärker/Filterstufe, die daraus die eigentlichen Befehle/Daten gewinnt, ein Controller, der die Befehle in Signale umwandelt, die die Treiber ansteuern, die widerum die elektromechanischen Teile mit Leistung versorgen.
Die Modifikation soll mit geringem Aufwand durchgeführt werden, weshalb nach Möglichkeit nur der Controller ersetzt werden soll. Der Betrieb verschiedener Fahrzeuge wird über eine Adresse ermöglicht, die den Befehlen hinzugefügt wird und im Controller mit der Fahrzeugadresse verglichen wird. Die proportionale Geschwindigkeitregelung wird über eine PWM (im Controller) realisiert, was bedeutet, dass die Motoransteuerung, die nur An und Aus kennt, nicht verändert werden muss. Der einzige Punkt der bisher nicht gelöst ist, ist die proprotionale Lenkung ohne die eingebaute Lenkung zu verändern. Deshalb lasse ich diesen Punkt aussen vor.
Der Sender schickt einen Befehl an den Empfänger. Es handelt sich dabei um Daten, die dem Empfänger mitteilen, was denn nun passieren soll. Die Anzahl der möglichen Befehle bei einem Microsizer ist sehr beschränkt. Der Leistungsumfang des Umbaus ist deutlich höher und deshalb muss die Fernsteuerung mehr "Innformationen" in einem Befehl an den Empfänger schicken, als es für einen Original Microsizer von Nöten ist. In Bits ausgedrückt (was um ehrlich zu sein wenig mit der jeweiligen technischen Realisierung zu tun hat, aber einen Vergleich der Informationsmenge zulässt) benutzt der Microsizer 5 Bit. Der modifizierte Sender/Empfänger aber 12 Bit. Trotzdem überträgt dieser die Informationen in der Regel schneller als der Microsizer. Der unterschiedliche Informationsgehalt erfordert ein eigenes Übertragungsprotokoll. Es wäre günstig ein bestehendes Protokoll zu verwenden um die zugehörigen Sender einsetzen zu können. Da aber der HF Teil und die Filterstufen bestehen bleiben, sind die Möglichkeiten deutlich eingeschränkt. Die Microsizer HF Stufe arbeitet mit Datensignalen von 1 kHz und 500 Hz. Da der Empfänger sich mit anderen Frequenzen sehr schwer tut, ist leider die Übernahme des Protokolls, z.B. von einem X-Trek oder X-Motor, selbst von einem 6-Tec nicht möglich, da diese alle mit deutlich höheren Frequenzen arbeiten. Somit ist dies der Grund, warum ein spezieller Fernsteuerungssender benötigt wird.
Eine Fernsteuerung schickt falls das Fahrzeug etwas machen soll einen Befehl an den Empfänger. Dieser Befehl wird ständig wiederholt. Dies erhöht zum einen die Wahrscheinlichkeit, dass der Befehl ankommt und erlaubt es andererseits dem Empfänger, das Auto anzuhalten, wenn es aus irgendeinem Grunde eine Zeit lang keinen Befehl erhält.
Will man nur ein Fahrzeug auf der gleichen Frequenz betreiben ist "eine langsame Übertragung (und eine Übnertragung, die auf einem 1 kHz Takt beruht ist langsam) " kein Problem. Denn man kann innerhalb einer Zehntel-Sekunde immer noch genug Befehle an das Auto senden, so dass es schnell genug reagiert auch wenn mal ein Befehl verloren geht (in unserem Falle 4 Stück). Will man aber mehrere Fahrzeuge auf der gleichen Frequenz betreiben, so müssen sich diese reihum "abschalten" um die anderen mal "ran zu lassen". Nun kann man die Pause in der eine Fernsteuerung stumm schaltet verlängern um sicher zu gehen, dass jeder Send mal dran kommt, was aber zu Lasten der "Empfangswahrscheinlichkeit" jedes einzelnen Fahrzeuges geht oder man macht die Pausen kürzer, was wiederum zu Problemen führen kann, weil sich die Fernsteuerungen ständig gegenseitig stören. Der Fernsteuersender erlaubt es die Pausen der Stummschaltung einzustellen, so dass man die Dauer der Stummschaltung dem jeweiligen Falle anpassen kann.
Der Original Controller hat vereinfacht gesprochen einen Eingang für die Daten und vier Ausgänge für die Treiber. Zwei steuern den Motor an, und je einer für die Lenkmagnete. Das sind nur 5 Signale, ein Microcontroller mit 8 Pins sollte also ausreichend sein. Vorausgesetzt, dass er keine externen Bauteile mehr für die Takterzeugung benötigt. Ebenso sollte der Chip eine Hardware-PWM haben um die Motordrehzal einstellen zu können und einen schnellen AD Wandler oder zumindest einen Komperator, um das Eingangssignal kontrolliert analysieren zu können. Auf der Platine befindet sich ein Spannungswandler der aus den 1,2 V Akkuspannung etwa 3,3V zum Betrieb von HF Teil, Filterstufe und Controller erzeugt. Der Microcontroller muss also mit 3,3 V oder besser mit 2,7 V funktionieren. Der ATTiny15L erfüllt alle diese Kriterien. Da der Chip 8 Pins hat (2 Versorgungsspannung + 6 I/Os) steht ein Pin noch zur freien Verfügung, dieser wird als zusätzlicher Ausgang z.B. für Leds verwendet.
... und der Umbau
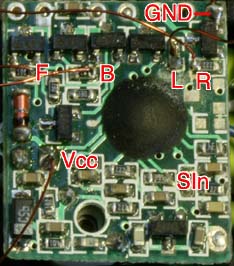
Es ist aus zwei Gründen nicht möglich den Original Controller zu entfernen. Zum einen enthält er Elemente der Verstärker/Filterstufe auf die man nicht verzichten kann und zum anderen ist er gebondet, was bedeutet man kriegt das Ding nicht von der Platine ohne sie zu zerstören. Also trennt man die Ausgänge des Original Controllers von den Treibern. Da vier Ausgänge Verwendung finden müssen vier Leiterbahnen gekappt werden. Anstatt Leiterbahnen zu trennen, kann man bei einigen Platinen auch die Vorwiderstände der Treiber entfernen. In diesem Falle muss man die Vorwiderstände natürlich am neuen Controller anbringen. Neben den Verbindungen zu den 4 Treibern wird noch das Eingangssignal mit den Daten benötigt und die Versorgsspannung. Dabei ist zu beachten, dass man die positive Spannung nicht vom Accu abgreift, sondern "hinter" dem Spannungsregler-Ausgang und über einen 47 Ohm Widerstand an den Controller führt. Die untenstehende Tabelle und das Bild zeigen, wo welche Schnitte zu machen sind. Es handelt sich bei der Platine um eine 2 Speed Platine. Bei der normalen Microsizer Platine liegen die Schnitte ähnlich. Im Bedarfsfalle, kann ich auch für diese entsprechende Bilder hochladen.
| Treiber F | Motor vorwärts | Controller Pin 7 | |
|
|
| Treiber B | Motor rückwärts | Controller Pin 6 | |||
| Treiber L | Lenkung links | Controller Pin 5 | |||
| Treiber R | Lenkung rechts | Controller Pin 3 | |||
| GND | Masse | Controller Pin 4 | |||
| Vcc | etwa +3,3V | Über einen Widerstand von 47 Ohm an Controller Pin 8 | |||
| SIn | Daten | Controller Pin 2 | |||
| Licht | Controller Pin 1 | ||||
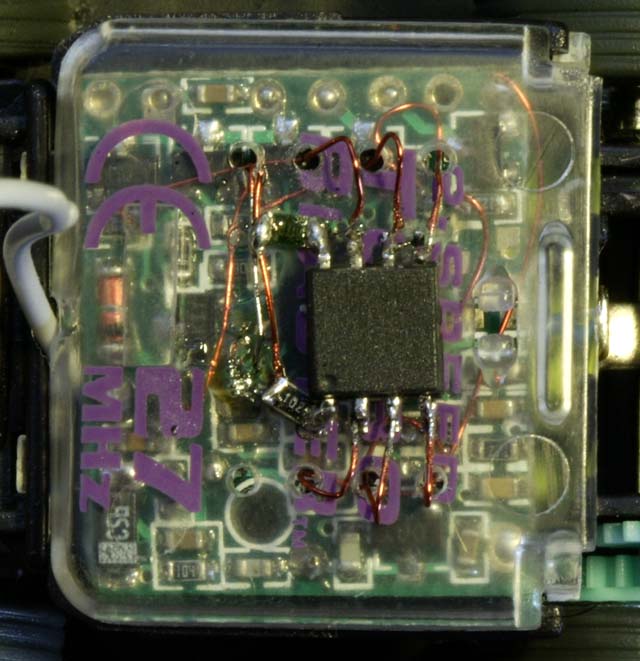
Um die Kabel nach Oben zu führen, habe ich zwei Reihen Löcher in den Klarsicht-Deckel gebohrt. Dazwischen wurde der Controller platziert, der Widerstand in die Versorgungsspannung geschleift und alle Anschlüsse verbunden. Auf dem Bild sieht man einen zweiten Widerstand, der aber nur für Testzwecke Verwendung findet.
Bei Rückfragen mail an Stephan Hess